In the water, pike can accelerate at a rate of eight to twelve g's - as
fast as a NASA rocket. To scientists, the speed is inexplicable. In an
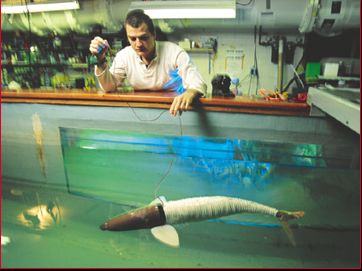
attempt to understand how the flap of thin fish tail can push a fish faster
than a propeller, John Kumph, then an MIT graduate student, built a robotic
version of a chain-pickerel - a species of pike - with a spring-wound
fiberglass exoskeleton and a skin made of silicone rubber. Now under further
development by iRobot, an MIT-linked company just outside Boston, the
robo-fish can't yet swim nearly as fast as a real pike, suggesting how
much remains to be learned. Kumph hopes that some quality of the skin
will be the key to learning the secrets of fish motion. If the speed is
due to the undulation of the fish, he says, the force will be much harder
to harness in a ship.
Origin
of Name
Robotic pike and movie title, respectively
Purpose
To develop new forms of underwater propulsion
Creative
Inspiration
Watching fish fly around underwater, Blade Runner
Height
15 cm
Length
81 cm
Weight
3 kg dry
Actuator
type, Number, and Kind
Futaba 9303 servos, Tower Hobbies TS-51
Vision
None
Sensors
None
Frame
Composition
Fiberglass
Batteries
NiCd
External
Power
17 V
Project Status
Ongoing
Information Source
John Muir Kumph