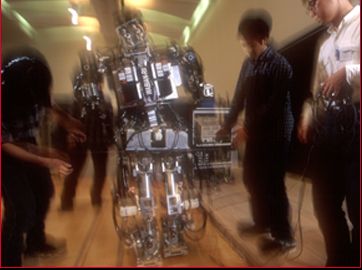
At a robotics exhibition in Tokyo, Samuel Setiawan (above, in white) and
two other Waseda University graduate students cautiously stand by during
a lengthy prewalk checklist for WABIAN-RII. To their dismay, the robot
initially has trouble negotiating the wooden floor, which is much springier
than the concrete floor in the lab, where it had been programmed to walk.
After some frantic reprogramming, Setiawan, the primary student researcher
on the project, is able to make WABIAN walk its assigned path. Even so,
the students have to spot the machine constantly. The students' care illustrates
one of the chief worries of scientists trying to make robots for the home
- their heavy creations might end up hurting the people they are supposed
to serve.
Origin
of Name
Acronym for Waseda Bipedal humANoid
Purpose
1) To clarify the motion-control mechanism of the
human form from the viewpoint of robotics; 2) to establish a base technology
to build the personal robots of the future
Creative Inspiration
The work of the late Ichiro Kato, often called the
father of Japanese robotics research
Height
1.83 m
Length
70 cm (across shoulders)
Weight
127 kg
Vision
2 color digital cameras
Sensors
27 rotary encoders, 2 6-axis force/torque sensors,
a 3-axis gyrometer
Frame Composition
Aluminum alloy, super-Duralmin, carbon fiber
Batteries
None
External Power
Single-phase 100 V AC, 3-phase 200 V AC
KLOC
10
Project Status
Ongoing
Information Source
Atsuo Takanishi